基于C8051单片机的CAN总线多点实时数据通信系统设计与实现
CAN(Controller Area Network,控制器局域网)总线以其高可靠性、实时性和灵活的网络拓扑结构,在汽车电子、工业控制等领域得到了广泛应用。本文探讨了以Silicon Labs C8051系列单片机为核心,构建一个稳定、高效的多点实时数据通信系统的设计方案与关键技术。
一、系统总体设计
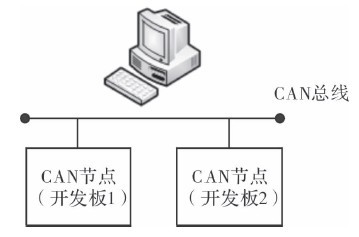
整个系统由多个CAN节点和一个上位机监控端构成。每个节点以C8051F040(内部集成CAN控制器)作为主控芯片,负责现场数据的采集(如温度、压力、开关量等)并通过CAN总线发送,同时接收来自总线上其他节点的指令或数据。系统采用多主结构,各节点地位平等,通过标识符(ID)进行报文滤波和优先级仲裁,确保关键数据的实时传输。上位机通过USB-CAN适配器接入总线,实现对整个网络的监控、数据记录与参数配置。
二、硬件设计关键
- 核心控制器:C8051F040单片机集成了CAN 2.0B控制器,支持高达1Mbps的通信速率,大大简化了外围电路设计。
- CAN收发器:采用TJA1050作为物理层接口芯片,负责将控制器的逻辑电平转换为满足ISO 11898标准的差分信号,具备优秀的抗电磁干扰能力。
- 网络拓扑与终端匹配:系统采用线性总线拓扑,在总线两端的节点处需接入120Ω终端电阻,以消除信号反射,保证通信质量。
三、软件设计与通信协议
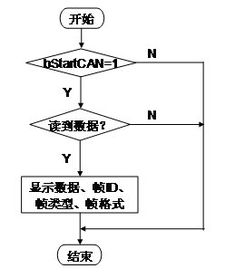
- 节点软件流程:各节点软件采用前后台或实时操作系统(如RTX51 Tiny)架构。主要任务包括:初始化(单片机、CAN控制器)、数据采集、应用数据处理、CAN报文发送(中断或查询方式)、CAN报文接收与处理(中断服务程序)。
- CAN通信协议制定:为实现有序的多点通信,需自定义高层应用层协议。关键内容包括:
- 标识符(ID)分配:合理规划11位或29位标识符,定义报文优先级、源/目标地址或功能码。
- 数据帧格式:定义数据场(最多8字节)的解析规则,如前两个字节为命令字,后续为数据内容。
- 通信机制:可采用主从问答、定时广播、事件触发等多种方式,满足实时性要求。
- 实时性保障:利用CAN总线基于ID的非破坏性仲裁机制,高优先级报文可优先发送。在软件层面,优化中断服务程序,减少关中断时间,并设置合理的报文发送队列管理机制。
四、系统实现与测试
搭建物理网络后,需进行系统性测试:
- 节点功能测试:验证各节点数据采集与本地处理的正确性。
- 通信测试:使用CAN总线分析仪(如PCAN-USB)抓取总线报文,测试点对点、广播通信的正确性,以及总线负载率。
- 实时性与可靠性测试:模拟关键事件(如报警信号),测试其从产生到被目标节点接收的延时;进行长时间运行和噪声环境下的稳定性测试。
五、结论与展望
基于C8051单片机的CAN总线系统,充分发挥了单片机资源丰富、集成度高和CAN总线实时可靠的优势,能够有效构建成本适中、性能稳定的分布式实时通信网络。该系统方案可广泛应用于工业现场数据采集、小型设备集群控制、智能楼宇等场景。可进一步研究如何集成更复杂的应用层协议(如CANopen),并利用C8051的在线调试功能优化系统性能,以应对更严苛的工业环境需求。
(注:文中提及的[图]因格式限制未在此呈现,实际设计文档中应包含系统框图、节点电路原理图及软件流程图等。)
如若转载,请注明出处:http://www.xiaolanren0719.com/product/61.html
更新时间:2026-06-19 19:04:06