CAN总线通信系统上位机软件开发教程 从设计到实现
CAN(Controller Area Network)总线是一种广泛应用于汽车、工业控制等领域的串行通信协议,具有高可靠性、实时性和抗干扰能力。开发一套功能完善的上位机通信软件,是监控、调试和管理CAN总线网络的关键。本教程将引导你完成CAN总线通信系统上位机软件的完整设计开发流程。
一、开发前的准备
- 硬件准备:
- CAN总线接口卡(如PCIe/USB接口的CAN卡,常用品牌有周立功、Kvaser、PEAK等)
- CAN总线分析仪(用于调试和监控)
- 目标CAN节点设备(如ECU、传感器等)
- 软件环境:
- 开发工具:Visual Studio(C#/C++)、Qt(C++)、Python(如PyQt)等
- CAN卡厂商提供的SDK/API驱动库
- 辅助工具:CAN总线分析软件(如CANalyzer、CANoe,用于对比验证)
二、软件架构设计
上位机软件通常采用分层架构:
- 驱动层:调用CAN卡厂商提供的API,实现底层的打开/关闭设备、配置波特率(如125kbps、500kbps)、发送/接收原始CAN帧。
- 协议解析层:解析CAN ID和数据域,根据应用层协议(如CANopen、J1939、自定义协议)进行编码/解码。
- 业务逻辑层:实现具体功能,如周期发送、报文过滤、数据记录、故障诊断等。
- 用户界面层:提供图形化操作界面,显示报文、曲线、状态等。
三、核心功能模块开发步骤
- 设备与通信初始化:
- 枚举可用CAN设备,选择通道。
- 初始化CAN控制器,设置波特率、工作模式(正常/只听)、滤波器(接收特定ID)。
- 启动通信线程,用于持续接收报文。
- 报文收发实现:
- 发送功能:构造CAN帧(ID、数据长度DLC、数据字节数组),调用发送API。支持单次发送、周期发送。
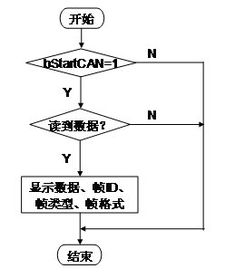
- 接收功能:在独立线程中循环读取接收缓冲区,解析帧信息(ID、数据、时间戳、帧类型)。
- 数据解析与显示:
- 设计报文列表视图,实时显示接收到的报文(ID、数据、ASCII解析、时间)。
- 支持数据可视化:将关键信号(如转速、温度)绘制为实时曲线图。
- 实现协议解析:例如,对J1939协议,解析PGN(参数组编号)和SPN(可疑参数编号)。
- 高级功能开发:
- 数据记录与回放:将报文保存为文件(如ASC、CSV格式),支持后期分析。
- 脚本自动化:集成Lua/Python脚本引擎,实现自动化测试。
- 诊断服务:支持UDS(Unified Diagnostic Services)等标准诊断协议。
- 网络管理:如CANopen节点守护、网络状态监控。
四、用户界面设计要点
- 主界面布局:采用多标签页或分割窗口,同时显示报文列表、曲线、状态栏。
- 配置面板:提供波特率、滤波器、发送周期等参数配置。
- 交互功能:支持报文高亮、过滤、搜索、统计(如帧率、错误帧计数)。
- 国际化与主题:考虑多语言支持和界面主题切换。
五、调试与测试
- 单元测试:验证单个功能模块,如发送接收循环测试。
- 集成测试:连接真实CAN网络,验证软件与硬件交互。
- 性能测试:评估高负载下的稳定性(如每秒处理数千帧)。
- 使用CAN分析仪对比数据,确保解析正确性。
六、注意事项
- 线程安全:接收线程与UI线程之间需通过队列或事件机制通信,避免界面卡顿。
- 错误处理:妥善处理设备断开、通信错误等异常情况。
- 兼容性:考虑不同厂商CAN卡的API差异,可设计抽象层来提高兼容性。
- 实时性:对于高实时性要求,可采用高精度定时器或实时操作系统扩展。
七、示例代码片段(C# + ZLG CAN卡API)`csharp
// 初始化设备
CANDeviceInfo[] devices = CANZLG.GetDeviceList();
CANChannel channel = devices[0].Channels[0];
channel.Init(500000, CAN_Mode.Normal);
channel.Start();
// 接收线程
void ReceiveThread()
{
while (isRunning)
{
CAN_Frame[] frames = channel.Receive(100);
foreach (var frame in frames)
{
// 更新UI(通过Invoke跨线程)
UpdateMessageList(frame.ID, frame.Data, frame.TimeStamp);
}
}
}
// 发送报文
CANFrame frame = new CANFrame(0x123, new byte[] {0x11, 0x22}, 2);
channel.Send(frame);`
开发CAN总线上位机软件需要结合硬件知识、通信协议和软件工程实践。从简单收发工具起步,逐步扩展功能,最终可形成专业的测试诊断平台。建议参考开源项目(如CANBoat、PCAN-View)和厂商文档,不断迭代优化。通过本教程的指导,希望你能够顺利搭建自己的CAN总线通信系统上位机软件,为车辆或工业控制系统开发提供有力工具。
如若转载,请注明出处:http://www.xiaolanren0719.com/product/81.html
更新时间:2026-06-05 07:33:43