CAN总线通信系统上位机通信软件的设计与开发教程
CAN总线通信系统因其高可靠性、实时性和抗干扰能力,在汽车电子、工业自动化等领域得到广泛应用。上位机通信软件作为CAN总线系统的重要组成部分,负责数据监控、分析和配置管理。本教程将分步骤介绍如何设计开发一个功能完整的上位机通信软件。
一、需求分析
在设计前,首先明确软件需求:
- 通信功能:支持CAN帧的发送与接收,可配置波特率、滤波规则。
- 数据解析:实时解析CAN数据,支持自定义协议解析。
- 用户界面:提供直观的数据显示、日志记录和参数配置界面。
- 数据存储:支持数据导出和回放功能。
- 扩展性:预留接口,便于后续功能扩展。
二、开发环境与工具选择
- 开发语言:推荐C++或C#,兼顾性能和开发效率。
- 开发框架:
- C++:使用Qt框架,内置CAN库支持。
- C#:使用Windows Forms或WPF,配合第三方CAN库如PCAN-Basic。
- 硬件依赖:确保计算机配备USB-CAN适配器,并安装相应驱动。
三、软件架构设计
采用分层架构,提升可维护性:
- 硬件驱动层:调用CAN适配器API,实现底层数据收发。
- 通信协议层:封装CAN帧结构,处理数据打包与解析。
- 业务逻辑层:实现数据过滤、协议解析和事件处理。
- 用户界面层:提供图形化操作界面,实时显示数据。
四、核心功能实现步骤
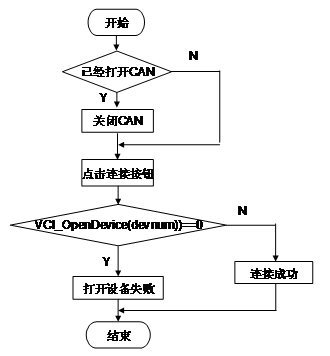
- 初始化CAN设备:
- 调用库函数打开CAN适配器,设置波特率(如500kbps)。
- 配置接收滤波,减少无关数据干扰。
- 数据收发模块:
- 发送功能:将用户输入数据封装为CAN帧,通过Write函数发送。
- 接收功能:启动独立线程监听CAN总线,使用Read函数异步获取数据。
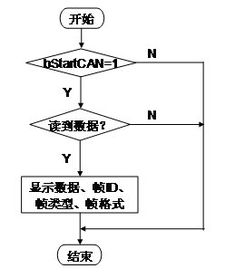
- 数据解析与显示:
- 设计协议解析器,将原始CAN数据转换为可读信息(如车速、温度)。
- 在界面中使用表格或曲线图实时展示数据,并支持数据导出为CSV或Excel格式。
- 用户界面开发:
- 使用控件(如DataGridView、Chart)构建主界面,分区域显示发送、接收数据和配置选项。
- 实现日志系统,记录操作和错误信息。
五、测试与优化
- 功能测试:连接实际CAN节点,验证数据收发准确性和实时性。
- 性能优化:采用多线程处理数据,避免界面卡顿;使用缓冲区减少数据丢失。
- 错误处理:增加异常捕获机制,如设备断开重连、数据校验失败提示。
六、部署与维护
- 打包发布:生成安装包,包含必要驱动和运行库。
- 用户文档:编写使用手册,说明软件操作和故障排除方法。
- 持续更新:根据用户反馈,迭代增加新功能(如多通道支持、远程监控)。
通过以上步骤,可以系统性地完成CAN总线通信系统上位机软件的开发。在实际项目中,还需结合具体应用场景调整功能设计,确保软件稳定高效地服务于整个通信系统。
如若转载,请注明出处:http://www.xiaolanren0719.com/product/47.html
更新时间:2026-06-19 13:19:41